Малые робототехнические комплексы в освоении Арктики
О.А. Букин, Д.Г. Ляхов. Морской государственный университет им. Г.И. Невельского, Институт проблем морских технологий ДВО РАН

Транспортные перевозки по Северному морскому пути (СМП) требуют разработки дополнительных мер обеспечения безопасности судоходства, поскольку акватория, по которой он пролегает, покрыта льдом большую часть года. Министерством транспорта РФ в 2013 г. были разработаны и утверждены Правила плавания в акватории СМП, согласно которым допускается плавание не только судов арктических ледовых категорий, но и судов с категориями ледовых усилений iсе1-iсе3, а также судов без ледовых усилений в период с июля по 15 ноября.
Морские перевозки в Арктике связаны с дополнительными рисками, которые вызваны, с одной стороны, с особыми условиями движения судна при наличии ледового покрова, и с другой стороны, с особой чувствительностью арктических экосистем к техногенному загрязнению морской среды. Ледовая обстановка даже в благоприятный период остается сложной, а вопрос проходимости льда является основным для мореплавателей. Средняя толщина льда по трассе СМП составляет около 2 метров; преобладающая сплоченность льда зимнего периода в арктических морях достигает максимальных значений (9-10 баллов). Основным фактором при оценке проходимости становится информация о распределении толщины льда на пути движения судна.
В общем случае администрация СМП предоставляет капитану навигационные рекомендации по результатам периодической ледовой разведки и множеству других данных, однако комплексные обобщенные ледовые карты не могут отразить реальные показатели ледовых характеристик на пути плавания судна, поэтому судоводитель должен в процессе плавания уточнять их, пользуясь для этого всеми доступными ему средствами.
В последнее время таким доступным средством уточнения ледовой обстановки стали малогабаритные беспилотные летательные аппараты, функциональные возможности которых заметно выросли. Хотя по набору инструментов ведения ледовой разведки пилотируемые авиационные комплексы на базе Ил-18 и радиолокационные системы бокового обзора с синтезированной апертурой типа «Нить-К» существенно превосходят любые известные на сегодня беспилотные аппараты, следует признать, что с конца 80-х такая аппаратура не эксплуатируется в Арктике. Пилотируемые вертолеты судового базирования для целей ледовой разведки в сравнении с беспилотными уже не имеют принципиального превосходства по техническим характеристикам. Например, радиус действия беспилотного аппарата «Горизонт Эйр S-100» (испытан в мае 2013 г. с ледокола «Капитан Сорокин») сравним с радиусом судового вертолета КА-32С (применялся в ходе экспедиции «Кара-зима-2014» с ледокола «Ямал») и составляет 100-150 км. Полезная нагрузка КА-32С (5000 кг) значительно больше S-100 (50 кг). Однако для принятия оперативных решений по оценке ледовой обстановки, вероятно, подойдет и фототелевизионный комплекс весом не более 50 кг. Инструментальная авиационная ледовая разведка и средства измерения для ее выполнения в данное время на акватории СМП не имеют систематического применения, поэтому технико-экономические показатели таких систем обобщить затруднительно.
Можно считать, что основной целью разработки малогабаритных беспилотных летательных аппаратов (БПЛА) судового базирования для ледовой разведки является фото/видеосьемка ледового покрова на дистанциях, превышающих видимость с мостика или дальность эффективной оценки сплоченности льдов при помощи штатной радиолокационной станции (РЛС), т.е. от 1-2 до 5-10 миль вперед по курсу судна.
В плане экономической эффективности транзита по СПМ наиболее привлекательным является режим сквозного безледокольного плавания, так как стоимость ледокольной проводки может составить более 40% стоимости доставки груза. В таком режиме возможны удары о лед, что требует оценки состояния корпуса и движетельно-рулевого комплекса.
Осмотр подводной части необходим и при плавании в устьях полярных рек, где непременно присутствует навигационная неопределенность по рельефу дна и, соответственно, опасность касаний.
Применение малогабаритного телеуправляемого подводного аппарата (МТПА) для осмотра подводной части судна в арктических условиях позволит существенно повысить безопасность мореплавания, и при интеграции на МТПА компактных приборов экологического мониторинга получать информацию о загрязнении морской среды, о чем прямо говорится в правилах: Глава 8 «Требования к судам касающиеся безопасности мореплавания и защиты морской среды от загрязнения с судов».
Средства ледовой разведки

На судах, осуществляющих регулярное плавание в арктических водах для ледовой разведки применяются пилотируемые вертолеты Ми-8, КА-32, BO-105 (рис. 1, 2). В ходе эксплуатации этих летательных аппаратов найдены технические решения и типовые вертолетные устройства. С целью минимизации эксплуатационных расходов уже достаточно продолжительное время ведутся разработки беспилотных вертолетов судового базирования (рис. 3, 4).

Northrop Grumman MQ-8 выпускается с начала 2000 года, первые автономные посадки на корабль он совершил в 2006 г. Другой широко известный аппарат Schiebel S-100 выпускается около 10 лет, палубные полеты производятся с 2008 года. Российский беспилотный вертолет корабельного базирования ZALA 421-06 прошел некоторые виды испытаний так же в 2008 г.
В последнее время наметились две различные тенденции построения беспилотных авиационных систем вертолетного типа.
В основе одной – серийный планер пилотируемого вертолета, что позволяет, исключив экипаж, сохранить и даже увеличить грузоподъемность и дальность. Другая опирается на выбор целевой аппаратуры минимально возможной массы при сохранении до некоторого оптимального уровня ее функциональных свойств и разработке специального малогабаритного аппарата вертикального взлета и посадки, часто с электрическим приводом.
Характерная стоимость изделий первого типа составляет 1-10 млн долларов, в то время как аппараты второго типа существенно дешевле – от нескольких тысяч до нескольких десятков тысяч долларов. Стоимость эксплуатации электровертолетов значительно ниже, чем вертолетов на двигателях внутреннего сгорания, к тому же последние достаточно сложны в эксплуатации.
Для испытаний метода проведения оперативной ближней ледовой разведки штатным экипажем судов в МГУ им. адм. Г.И. Невельского разработан малогабаритный беспилотный летательный аппарат (рис. 4). Этот аппарат применялся в научно-образовательной экспедиции учебно-производственного судна «Профессор Хлюстин» в Восточном секторе Арктики (23.07-09.09.2013 г.). Основная цель его создания – обеспечить проведение силами штатного экипажа судна оперативной ближней ледовой разведки. Управление малогабаритными БПЛА не должно быть рассчитано на специально обученного оператора; информация, поступающая с него, должна быть наглядной и позволять штурманам легко принимать решения при движении во льдах.
Подводные аппараты в высоких широтах
Изучение состояния ледового покрова в высоких широтах с помощью необитаемых подводных аппаратов начались в начале 1970-х годов [1]. Три зенитных эхолота, установленных на аппарате UARS, позволяли определять наличие разводий и оценивать размеры полыньи.
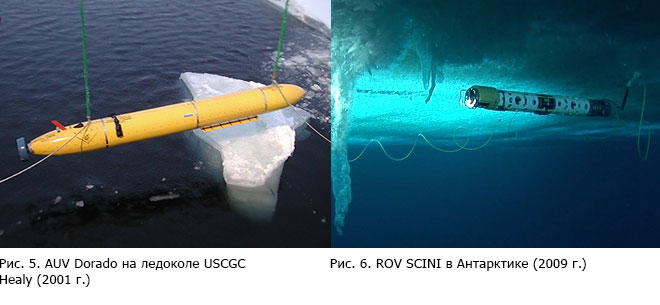
Современные инструментальные исследования толщины льда с подводного аппарата начались в 2001 году в рамках серии экспериментов ALTEX (Atlantic Layer Tracking Experiment) с помощью акустического прибора Ice Profiler [2, 3], установленного на автономном необитаемом подводном аппарате (АНПА) типа Dorado (в настоящее время Bluefin-21, рис. 5). Исследование ледового покрова проводилось на участке площадью 2,5х2,5 км или линейной трансекте ~50 км.
Другая значимая программа по изучению свойств среды и ледовых покровов AUI (Autosub Under Ice) была осуществлена также в начале 2000-х с помощью английского акустического необитаемого подводного аппарата Autosub. Исследования проводились преимущественно в Антарктике и Гренландии. С помощью установленного на АНПА вверх смотрящего многолучевого эхолота (МЛЭ) EM2000 в 2004 году удалось получить 3D-изображение нижней кромки льда. Характерная ширина полосы обследования составляла около 100 метров с горизонтальным разрешением ~1 м. Автономные аппараты типа Bluefin-21 и Autosub при своих многочисленных преимуществах имеют значительную массу 0,5-3 т и требуют специальных спускоподъемных устройств.
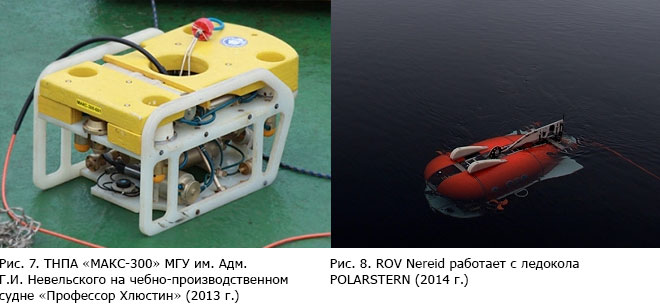
Начиная с 2007 года ведутся попытки применения малогабаритных аппаратов – автономных универсальных типа GAVIA, REMUS, IVER, а также специально разработанных телеуправляемых типа SCINI диаметром 150 мм, весом ~20 кг. [4]. (рис. 6). Новейший специализированный аппарат ROV Nereid (рис. 8) для работы в высоких широтах подо льдом был испытан в рейсе PS86 научно-исследовательского судна Polarstern в июле текущего года. Основным сенсором изучения нижней кромки пока является многолучевой эхолот Imagenex DT100. Nereid принадлежит к гибридному классу подводных аппаратов, использует бортовую систему электроснабжения (выбег 40-60 км на скорости 1 м/с) и оптоволоконный кабель большой длины (до 20 км). При весе около 2 т полезная нагрузка составляет около 100 кг.
 Практически все известные подводные аппараты, применяемые в высоких широтах, являются экспериментальными образцами или стендами (testbed) для научных исследований. Прикладное применение имеют лишь малогабаритные ТНПА для подстраховки работы АНПА в полынье.
Практически все известные подводные аппараты, применяемые в высоких широтах, являются экспериментальными образцами или стендами (testbed) для научных исследований. Прикладное применение имеют лишь малогабаритные ТНПА для подстраховки работы АНПА в полынье.
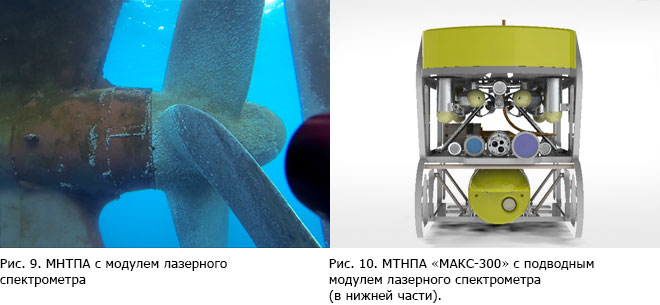
Малогабаритный телеуправляемый необитаемый подводный аппарата (МТНПА) обследовательского класса «МАКС-300» разработан МГУ им. адм. Г.И. Невельского и ИПМТ ДВО РАН для отработки методов обследования и аппаратурных решений задач, связанных с обеспечением безопасности судоходства и экологической безопасности в Арктическом регионе. Для этого он оснащен цветными и черно-белыми видеокамерами, которые используются для съемки подводных объектов на глубине до 300 метров, и комплексом аппаратуры для измерения гидрологических параметров. МТНПА позволяет нести на себе модуль аппаратно-программного комплекса лазерного спектрометра. Последний предназначен для проведения лазерного спектрального анализа подводных акваторий, включая биологические объекты и грунт морского дна (рис. 7).
 Практически все известные подводные аппараты, применяемые в высоких широтах, являются экспериментальными образцами или стендами (testbed) для научных исследований. Прикладное применение имеют лишь малогабаритные ТНПА для подстраховки работы АНПА в полынье.
Практически все известные подводные аппараты, применяемые в высоких широтах, являются экспериментальными образцами или стендами (testbed) для научных исследований. Прикладное применение имеют лишь малогабаритные ТНПА для подстраховки работы АНПА в полынье.
Малогабаритный телеуправляемый необитаемый подводный аппарата (МТНПА) обследовательского класса «МАКС-300» разработан МГУ им. адм. Г.И. Невельского и ИПМТ ДВО РАН для отработки методов обследования и аппаратурных решений задач, связанных с обеспечением безопасности судоходства и экологической безопасности в Арктическом регионе. Для этого он оснащен цветными и черно-белыми видеокамерами, которые используются для съемки подводных объектов на глубине до 300 метров, и комплексом аппаратуры для измерения гидрологических параметров. МТНПА позволяет нести на себе модуль аппаратно-программного комплекса лазерного спектрометра. Последний предназначен для проведения лазерного спектрального анализа подводных акваторий, включая биологические объекты и грунт морского дна (рис. 7).
К настоящему времени аппарат прошел испытания на неспециализированных судах. На парусном учебном судне «Надежда» во время экспедиции в 2012 году исследования проводились в Японском море при погружении до глубин 50 метров и скорости придонных течений порядка 1 узла. В 2013 году испытания прошли с борта учебно-производственного судна «Профессор Хлюстин» в Восточном секторе Арктики. После прохода ледовых полей в проливе Лонга (Чукотское море) при помощи малогабаритного телеуправляемый необитаемый подводный аппарата «МАКС-300» было проведено обследование подводной части корпуса судна и винто-рулевой группы (рис. 11). Во время прохождения ледового поля в проливе Лонга МТНПА использовался для обследования нижней границы кромки льда. Наличие быстроразвертываемого аппарата на борту судна позволяет в некоторых случаях отказаться от использования водолазов. Так, например, было сделано в 2013 году с парусным учебным судном «Надежда» МГУ им. адм. Г.И. Невельского, которое после предварительного обследования подводной части судна при помощи ТНПА было постановлено в доковый ремонт.
Оснащение «МАКС-300» погружным модулем с лазерным спектрометром значительно расширяет спектр задач, решаемых с использованием телеуправляемого необитаемого подводного аппарата обзорного типа. Лазерный спектрометр рассчитан на регистрацию спектров комбинационного рассеяния (КР) и спектров лазерной индуцированной флуоресценции (ЛИФ) морской воды, органического вещества, содержащегося в морской воде во взвешенном и растворенном состоянии, включая клетки фитопланктона и углеводороды нефти, а также грунта морского дна. В настоящее время разработан лабораторный вариант лазерного спектрометра, который предназначен для размещения в погружаемом модуле на «МАКС-300». Лабораторные эксперименты, позволяют сделать вывод о том, что минимально обнаруживаемые концентрации, которые способен измерять данный спектрометр, для растворенного органического вещества (РОВ) в морской воде составляют порядка 15 мкг/л и для хлорофилла А – от 5 мкг/л. При этом возможно проводить регистрацию растворенных в морской воде углеводородов нефти на фоне сигнала лазерной индуцированной флуоресценции от растворенного органического вещества при концентрации углеводородов нефти свыше 15 мкг/л [5].
Это позволяет использовать подобные телеуправляемые необитаемые подводные аппараты обследовательского класса для проведения мониторинга состояния нефте- и газопроводов и обнаруживать возможные повреждения на ранних стадиях. Размещение лазерного спектрометра на ТНПА наряду с решением задач по обеспечению безопасности судоходства и экологической безопасности позволит проводить исследования по широкому спектру направлений, связанных с морскими экосистемами и климатическими изменениями в Арктике. Особенно это актуально при проведении подспутниковых измерений, которые обеспечивают надежную интерпретацию спутниковых данных [6]. Последний вопрос особенно актуален для арктических акваторий, где кроме обычных проблем интерпретации спутниковых данных об океане существует целый ряд проблем, вызванных спецификой арктических широт. В этом смысле использование лазерных технологий при исследовании морских акваторий в Арктике позволяет значительно расширить круг задач, решаемых с применением робототехнических комплексов [7].
Малогабаритный беспилотный летательный аппарат был так же испытан нами в арктических условиях при отработке методов проведения ближней ледовой разведки. Технические параметры «квадрокоптера» позволили проводить запуск и посадку с движущегося со скоростью порядка 9 узлов судна. На рис. 12 и 13 приведены фотографии отдельных льдин и ледового поля, сделанные с МБПЛА, полученные в Восточном секторе Арктики во время экспедиции на УПС «Профессор Хлюстин».

Заключение
Использование экипажем судов, следующих по трассе СМП, малогабаритных робототехнических средств для оперативного мониторинга ледовой обстановки и состояния судна позволяет получить значительно больший объем информации, который необходим для принятия экипажем решений о движении судна. Расширение возможностей малогабаритных беспилотных летательных аппаратов для обследования ледовой разведки связывается с разработкой аппаратно-программного комплекса (АПК) для измерения толщины льда, которое можно проводить в автоматическом режиме и передавать на судно во время облета ледовых полей. Этому будет способствовать также и установка на БПЛА малогабаритной оптической поляризационной системы, которая позволит регистрировать нефтяную пленку на морской поверхности и измерять ее толщины с целью определения объема нефтяных загрязнений на морской поверхности.
В перспективе и лазерный спектрометр лазерной индуцированной флуоресценции, установленный на малогабаритный телеуправляемый необитаемый подводный аппарата, будет дополнен спектрометром лазерной искровой спектроскопии, который позволяет проводить оперативный элементный состав жидких и твердых сред под водой. К настоящему времени нами разработан малогабаритный судовой спектрометр ЛИС, который планируется к установке на ТНПА «МАКС-300». С его помощью можно будет обеспечить измерение МОК-элементов в морской воде на уровне 10-3 – 10-4 г/л. Последние эксперименты, проведенные с использованием лазерных импульсов фемтосекундной длительности, показали возможность определения элементного состава на уровне концентраций 10-6-10-8 г/л [8,9].
 Print This Post
Твитнуть
Print This Post
Твитнуть